Пример 3. Целевое программирование
Провести оптимизацию вектор – функции 
 |
при ограничениях
 |

Рис.
5.3. Данные для решения примера 3.Решение. Введем данные на рабочий лист в соответствии с Рис. 5.3.
Отведем под значения переменных ячейки A20 и B20; введем формулы, определяющие ограничения задачи, в ячейки A16:A17; формулы для расчета функций  в ячейки E20, G20 и I20, а формулу для расчета
в ячейки E20, G20 и I20, а формулу для расчета  - в ячейку C28. Поскольку наши функции нелинейны, в окне диалога Параметры поиска решения необходимо снять флажок (указатель) линейная модель.
- в ячейку C28. Поскольку наши функции нелинейны, в окне диалога Параметры поиска решения необходимо снять флажок (указатель) линейная модель.
Далее последовательно проводим поиск оптимальных (максимальных) значений функций (целевыми ячейками выбираем E20, G20 и I20); после нахождения оптимальных значений каждой из функций ее максимальное значение заносим (используя специальную вставку) в ячейки E24, G24 и I24 соответственно. Таким образом, в ячейках окажутся значения: 1.0748 (E24), 0.7357 (G24), 2 (I24).
После этого переходим к заключительному этапу. Оптимизируем (минимизируем) значение целевой функции  (целевая ячейка С28). Поиск решения дает для оптимального значения целевой функции значение 0,32534.
(целевая ячейка С28). Поиск решения дает для оптимального значения целевой функции значение 0,32534.
 , соответствующие значениям
, соответствующие значениям  , при которых отклонение
, при которых отклонение  от
от  будет минимальным.
будет минимальным. Таким образом, при данных значениях весовых коэффициентов мы получаем следующие оптимальные (с точки зрения достижения оптимального значения “совокупной” функции  ) значения компонент вектор функции:
) значения компонент вектор функции:
 |  |  |  |  |  |
| 1,0748 | 0,7815 | 0,7358 | 0,3609 | 2 | 1,6784 |
Из вышеприведенной таблицы видно, что в результате оптимизации значения всех трех функций-составляющих уменьшились. Естественно, при использовании других весовых коэффициентов мы получили бы другие значения (но при любых значениях весовых коэффициентов тенденция уменьшения всех компонент вектор-функции сохраняется).
Следует отметить, что задача целевого программирования может формулироваться несколько иным образом.
ЛПР может просто указать, исходя из своих соображений, желательные с его точки зрения, значения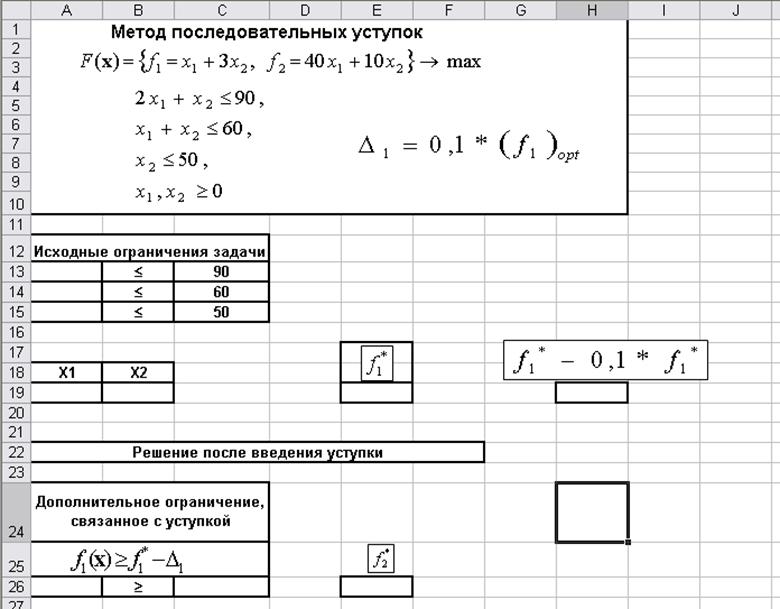 , или диапазоны, в которых эти значения должны быть локализованы. При этой постановке задача решается практически аналогично, с тем отличием, что поиск оптимальных значений компонент (первая часть решения) не проводится, а их значения (или диапазоны изменения) вводятся в качестве ограничений дополнительно к исходным ограничениям задачи.
, или диапазоны, в которых эти значения должны быть локализованы. При этой постановке задача решается практически аналогично, с тем отличием, что поиск оптимальных значений компонент (первая часть решения) не проводится, а их значения (или диапазоны изменения) вводятся в качестве ограничений дополнительно к исходным ограничениям задачи. Контрольные вопросы к теме:
1. Понятие векторного критерия
2. Типы многокритериальных задач
3. Проблемы нормализации, выбора принципа оптимальности, учета приоритета критериев, вычисления оптимума
4. Перечислите способы преобразований критериев к безразмерному виду
5. Принцип оптимальности Парето
6. Принцип равновесия по Нэшу
7. Перечислите главные особенности равновесных (по Нэшу) ситуаций
8. Конфликты, переговоры и компромиссы
9. Методы решения задач векторной оптимизации